11.9. High-level interface: Obstacle avoidance (MATLAB & Python)¶
In this example we illustrate the simplicity of the high-level user interface on a vehicle optimal trajectory generation problem. The user can place an obstacle in front of the vehicle using an interactive window and the car trajectory is automatically adjusted.
In particular, we use a kinematic bicycle model described by a set of ordinary differential equations (ODEs):
with:
The model consists of five differential states: \(x\) and \(y\) are the Cartesian coordinates of the car, and \(v\) is the linear velocity. The angles \(\theta\) and \(\delta\) denote the heading angle of the car and its steering angle. Next, there are two control inputs to the model: the acceleration force \(F\) and the steering rate \(\phi\). The angle \(\beta\) describes the direction of movement of the car’s center of gravity relative to the heading angle \(\theta\). The remaining three constant parameters of the system are the car mass \(m=1\,\mathrm{kg}\), and the lengths \(l_r=0.5\,\mathrm{m}\) and \(l_f=0.5\,\mathrm{m}\) specifying the distance from the car’s center of gravity to the rear wheels and the front wheels, respectively.
The trajectory of the vehicle will be defined as an NLP. First, we define stage variable \(z\) by stacking the input and differential state variables:
You can download the code of this example to try it out for yourself by
clicking here (MATLAB)
or here (Python).
11.9.1. Defining the MPC Problem¶
11.9.1.1. Objective¶
In this example the cost function provided by model.objective is the same for all stages.
We have a target position \((3,0)\) and we want to minimize the distance of the
car to that point. Therefore, the distance is penalized with linear costs.
Plus, some small quadratic costs are added to the inputs \(F\) and
\(s\), i.e.:
The stage cost function is coded in MATLAB and Python as the following function:
model.objective = @objective
function f = objective(z)
F = z(1);
phi = z(2);
x = z(3)
y = z(4);
f = 100*abs(x-0) + 100*abs(y-3) + 0.1*F^2 + 0.01*phi^2;
end
model = forcespro.nlp.SymbolicModel() # create empty model
model.objective = lambda z: 100 * casadi.fabs(z[2] - 0.) \
+ 100 * casadi.fabs(z[3] - 3.) \
+ 0.1 * z[0]**2 + 0.01 * z[1]**2
11.9.1.2. Matrix equality constraints¶
The matrix equality constraints model.eq in this example result from the vehicle’s dynamics
given above. First, the continuous dynamic equations are implemented as follows:
function [ xDot ] = continuousDynamics(x,u)
% state x = [xPos,yPos,v,theta,delta], input u = [F, phi]
% set physical constants
l_r = 0.5; % distance rear wheels to center of gravity of the car
l_f = 0.5; % distance front wheels to center of gravity of the car
m = 1.0; % mass of the car
% set parameters
beta = atan(l_r/(l_f + l_r) * tan(x(5)));
% calculate dx/dt
xDot = [ x(3) * cos(x(4) + beta); % dxPos/dt = v*cos(theta+beta)
x(3) * sin(x(4) + beta); % dyPos/dt = v*cos(theta+beta)
u(1)/m; % dv/dt = F/m
x(3)/l_r * sin(beta); % dtheta/dt = v/l_r*sin(beta)
u(2)]; % ddelta/dt = phi
end
def continuous_dynamics(x, u):
""" state x = [xPos,yPos,v,theta,delta], input u = [F,phi]"""
# set physical constants
l_r = 0.5 # distance rear wheels to center of gravity of the car
l_f = 0.5 # distance front wheels to center of gravity of the car
m = 1.0 # mass of the car
# set parameters
beta = casadi.arctan(l_r/(l_f + l_r) * casadi.tan(x[4]))
# calculate dx/dt
return np.array([x[2] * casadi.cos(x[3] + beta), # dxPos/dt = v*cos(theta+beta)
x[2] * casadi.sin(x[3] + beta), # dyPos/dt = v*sin(theta+beta)
u[0] / m, # dv/dt = F/m
x[2]/l_r * casadi.sin(beta), # dtheta/dt = v/l_r*sin(beta)
u[1]]) # ddelta/dt = phi
Now, these continuous dynamics are discretized using an explicit Runge-Kutta
integrator of order 4 as shown below. Note that the function RK4 is included
in the FORCESPRO client software.
integrator_stepsize = 0.1;
model.eq = @(z) RK4( z(3:7), z(1:2), @continuousDynamics,...
integrator_stepsize);
integrator_stepsize = 0.1
# z[2:7] = states x, z[0:2] = inputs u
model.eq = lambda z: forcespro.nlp.integrate(continuous_dynamics, z[2:7], z[0:2],
integrator=forcespro.nlp.integrators.RK4,
stepsize=integrator_stepsize)
As a last step, the indices of the left hand side of the dynamical constraint are defined. For efficiency reasons, make sure the matrix has structure [0 I].
model.E = [zeros(5,2), eye(5)];
model.E = np.concatenate([np.zeros((5,2)), np.eye(5)], axis=1)
11.9.1.3. Runtime Parameters¶
The user can place an obstacle to be avoided in front of the car. The x- and y-coordinates of the position \(p\) of this obstacle are considered as runtime parameters of the system.
The runtime parameters are the same for all stages. Their values will be set later on at runtime.
11.9.1.4. Inequality constraints¶
The maneuver is subjected to a set of constraints, involving both the simple bounds:
as well the nonlinear nonconvex constraints in dependence of the runtime parameters \(p\)
The implementation of the simple bounds is given here:
% upper/lower variable bounds lb <= z <= ub
% inputs | states
% F phi x y v theta delta
model.lb = [ -5.0, deg2rad(-40), -3., 0., 0., -inf, -0.48*pi];
model.ub = [ +5.0, deg2rad(+40), 0., 3., 2., +inf, 0.48*pi];
# upper/lower variable bounds lb <= z <= ub
# inputs | states
# F phi x y v theta delta
model.lb = np.array([-5., np.deg2rad(-40.), -3., 0., 0, -np.inf, -0.48*np.pi])
model.ub = np.array([+5., np.deg2rad(+40.), 0., 3., 2., np.inf, 0.48*np.pi])
The nonlinear constraint function \(h\) with its bounds can be coded in MATLAB/Python as follows:
% General (differentiable) nonlinear inequalities hl <= h(x,p) <= hu
model.ineq = @(z,p) [ z(3)^2 + z(4)^2; % x^2 + y^2
(z(3)-p(1))^2 + (z(4)-p(2))^2 ]; % (x-p_x)^2 + (y-p_y)^2
% Upper/lower bounds for inequalities
model.hu = [9, +inf]';
model.hl = [1, 0.7^2]';
# General (differentiable) nonlinear inequalities hl <= h(x,p) <= hu
model.ineq = lambda z,p: np.array([z[2]**2 + z[3]**2, # x^2 + y^2
(z[2] - p[0])**2 + (z[3] - p[1])**2]) # (x-p_x)^2 + (y-p_y)^2
# Upper/lower bounds for inequalities
model.hu = np.array([9, +np.inf])
model.hl = np.array([1, 0.7**2])
11.9.1.5. Dimensions¶
Furthermore, the number of variables, constraints and real-time parameters explained above needs to be provided as well as the length of the multistage problem. For this example, we chose to use \(N = 50\) stages in the NLP:
model.N = 50; % horizon length
model.nvar = 7; % number of variables
model.neq = 5; % number of equality constraints
model.nh = 2; % number of inequality constraint functions
model.npar = 2; % number of runtime parameters
model.bfgs_init = 3.0*eye(7); % set initialization of the hessian approximation
model.N = 50 # horizon length
model.nvar = 7 # number of variables
model.neq = 5 # number of equality constraints
model.nh = 2 # number of inequality constraint functions
model.npar = 2 # number of runtime parameters
model.bfgs_init = 3.0*np.identity(7) # initialization of the hessian approximation
11.9.1.6. Initial conditions¶
The goal of the maneuver is to steer the vehicle from a set of initial conditions:
For the code generation, only the indices of the variables to which initial values will be applied are required. This is coded as follows:
model.xinitidx = 3:7;
model.xinitidx = range(2,7)
11.9.2. Generating a solver¶
We have now populated model with the necessary fields to generate a solver
for our problem. Now we set some options for our solver and then use the
function FORCES_NLP to generate a solver for the problem defined by
model:
%% Define solver options
codeoptions = getOptions('FORCESNLPsolver');
codeoptions.maxit = 400; % Maximum number of iterations
codeoptions.printlevel = 0; % Use printlevel = 2 to print progress (but not for timings)
codeoptions.optlevel = 3; % 0: no optimization, 1: optimize for size, 2: optimize for speed, 3: optimize for size & speed
codeoptions.cleanup = false;
codeoptions.timing = 1;
codeoptions.nlp.ad_tool = 'casadi';
%% Generate FORCESPRO solver
FORCES_NLP(model, codeoptions);
# Set solver options
codeoptions = forcespro.CodeOptions('FORCESNLPsolver')
codeoptions.maxit = 400 # Maximum number of iterations
codeoptions.printlevel = 0
codeoptions.optlevel = 0 # 0 no optimization, 1 optimize for size, 2 optimize for speed, 3 optimize for size & speed
codeoptions.noVariableElimination = 1.
# Creates code for symbolic model formulation given above, then contacts server to generate new solver
solver = model.generate_solver(codeoptions)
11.9.3. Calling the generated solver¶
Once all parameters of the problem instance to be solved have been populated, the MEX interface of the solver can be used to invoke it.
% Set runtime parameters
params = [-1.5; 1.0];
problem.all_parameters = repmat(params,model.N,1);
% Set initial guess to start solver from (here, middle of upper and lower
% bound)
x0i=[0.0,0.0,-1.5,1.5,1.,pi/4.,0.];
x0=repmat(x0i',model.N,1);
problem.x0=x0;
% Set initial conditions. This is usually changing from problem instance
% to problem instance:
model.xinit = [-2., 0., 0., deg2rad(90), 0.]';
problem.xinit = model.xinit; % xPos=-2, yPos=0, v=0 (standstill),
% heading angle=90deg, steering angle=0deg
% Time to solve the NLP!
[output,exitflag,info] = FORCESNLPsolver(problem);
% Make sure the solver has exited properly.
if (exitflag < 0)
fprintf([newline 'Some error in FORCESPRO solver. exitflag=%d'...
newline],exitflag)
elseif (exitflag == 0)
fprintf([newline 'Error in FORCESPRO solver: Maximum number'...
' of iterations was reached. ' newline]);
else
fprintf([newline 'FORCESPRO took %d iterations and %f seconds '...
'to solve the problem.' newline], info.it, info.solvetime);
end
# Set initial guess to start solver from (here, middle of upper and lower bound)
x0i = np.array([0.,0.,-1.5,1.5,1.,np.pi/4.,0.])
x0 = np.transpose(np.tile(x0i, (1, model.N)))
# set initial condition
xinit = np.transpose(np.array([-2.,0.,0.,np.deg2rad(90),0.]))
problem = {"x0": x0,
"xinit": xinit,
"xfinal": xfinal}
# Set runtime parameters
params = np.array([-1.5,1.]) # In this example, the user can change these parameters by clicking into an interactive window
problem["all_parameters"] = np.transpose(np.tile(params,(1,model.N)))
# Time to solve the NLP!
output, exitflag, info = solver.solve(problem)
# Make sure the solver has exited properly.
assert exitflag == 1, "bad exitflag"
print("FORCES took {} iterations and {} seconds to solve the problem.".format(info.it, info.solvetime))
11.9.4. Results¶
The goal is to find a trajectory that steers the vehicle from point A as close as possible to point B while avoiding obstacles. The trajectory should also be feasible with respect to the vehicle dynamics and its safety and physical limitations. The calculated vehicle’s trajectory in 2D space is presented in Figure 11.33. The progress of the other states and the inputs over time is shown in Figure 11.34. One can see that all constraints are respected. To try out other obstacle positions you can run the example file on your own machine and click into the interactive window.
You can download the code of this example by clicking here (MATLAB)
or here (Python).
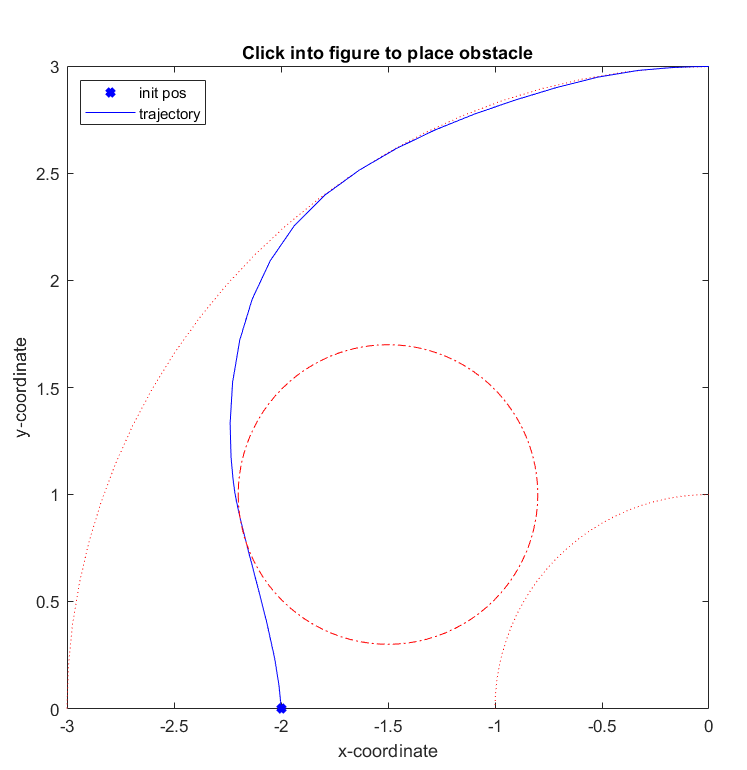
Figure 11.33 The calculated trajectory of the car¶
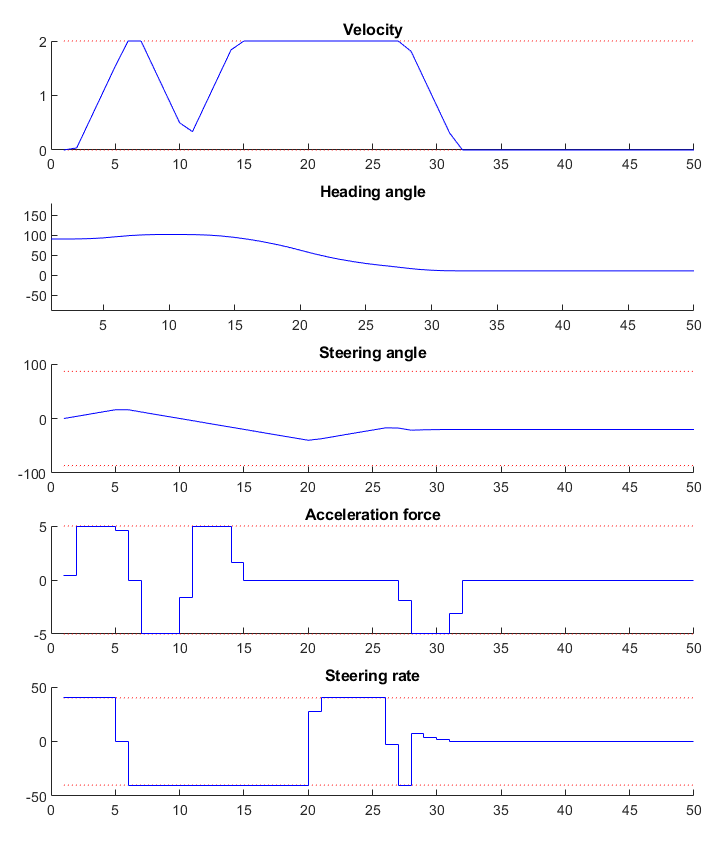
Figure 11.34 Development of the vehicle’s states and the system’s inputs over time¶
11.9.5. Variation: External functions¶
In this variation, we want to supply the required functions through external functions in C. To do so we have to provide the directory that contains said source files in the MATLAB code:
%% Define source file containing function evaluation code
model.extfuncs = 'C/myfevals.c';
We also need to include the two extern functions car_dynamics and
car_dynamics_jacobian, both contained in the car_dynamics.c file,
through the other_srcs options field:
% add additional source files required - separate by spaces if more than 1
codeoptions.nlp.other_srcs = 'C/car_dynamics.c';
In Python, we need to switch to an ExternalFunctionModel if we intend to use
external callbacks. We give the main callback evaluating the objective function,
equality constraints and inequality constraints, using the set_main_function()
, and supply any additional files required by this callback using
add_auxiliary().
model = forcespro.nlp.ExternalFunctionModel()
# Define source file containing function evaluation code
model.set_main_callback("C/myfevals.c", function="myfevals")
model.add_auxiliary("C/car_dynamics.c")
# One can also add a 'relative_to' argument specifying the paths to be understood
# relative to this file's location. if not supplied, paths are relative to the
# current working directory in which this script is executed:
# model.set_main_callback('c/myfevals.c', function="myfevals" relative_to=os.path.dirname(__file__))
# model.add_auxiliary('c/car_dynamics.c', relative_to=os.path.dirname(__file__))
You can download the code of this variation to try it out for yourself
by clicking here (MATLAB)
or here (Python).
The C-code for the function evaluations
and the car dynamics is also available.