11.4. Low-level interface: Active Suspension Control¶
11.4.1. Introduction¶
The concept of using future information, as described in the section How to Incorporate Preview Information in the MPC Problem can be applied to more advanced systems. In this example a driving vehicle is considered, equipped with sensors that measure the unevenness of the road ahead as shown in the picture below.

The preview information can be used to improve the riding comfort, i. e. minimize the heave, pitch and roll accelerations, by actively controlling the suspension of the vehicle. This example is based on the reduced car model described in [GörSch]
The states \(x\) of the system are ‘heave displacement’ \(z_b\) [m], ‘pitch angle’ \(\varphi\) [rads], ‘roll angle’ \(\theta\) [rads], ‘heave velocity’ \(\dot{z}_b\) [m/s], ‘pitch rate’ \(\dot{\varphi}\) [rads/s] and ‘roll rate’ \(\dot{\varphi}\) [rads/s]. The input \(u\) [m] to the system are the ‘active spring displacements’. The output \(y\) is given by the ‘heave acceleration’ \(\ddot{z}_b\) \(\text{[m/s}^2\text{]}\), the ‘pitch acceleration’ \(\ddot{\varphi}\) \(\text{[m/s}^2\text{]}\) and the ‘roll acceleration’ \(\ddot{\theta}\) \(\text{[m/s}^2\text{]}\). In the reduced model, the input contains not only the active spring displacements but also the measurements of the height profile of the upcoming road \(w\) and its first derivative \(\dot{w}\).
There are constraints on the actuators, i. e. minimal and maximal adjustment track, \(\underline{u} = - 0.04 [m]\) and \(\overline{u} = 0.04 [m]\). This results in the following state space system:
In the following it is shown how the FORCESPRO MATLAB Interface can be used to design a controller using preview information, substantially increasing the riding comfort compared to a vehicle with a passive suspension. The discrete vehicle model is sampled at 0.025 [s] and it is assumed that road preview information for 0.5 [s] (20 steps) is available to the controller.
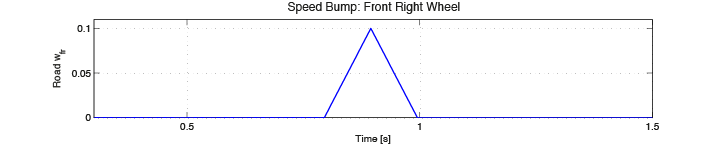
11.4.2. Disturbance Model: Speed Bump¶
The vehicle is assumed to be driving at a constant speed of 5 [m/s] over a speed bump of length 1 [m] with a height of 0.1 [m]. The disturbance in time domain is depicted on the right side. The road bump only hits the front right wheel, while the front left wheel is not affected. The same bump will hit the rear right wheel 1.12 [s] after it hits the front wheel.
11.4.3. Implementation of Preview Information¶
This is a linear MPC problem with lower and upper bounds on inputs and a terminal cost term:
At each sampling instant the initial state \(x\) and the preview information \(w_i\) and \(\dot{w}_i\) change, and the first input \(u_0\) is typically applied to the system after an optimal solution has been obtained.
% Parameters: First Equation RHS
parameter(1) = newParam('minusA_times_x0_minusBw_times_w_pre',1,'eq.c');
% Parameters: Preview Information
parameter(2) = newParam('pre2_w',2,'eq.c');
...
parameter(n) = newParam('pren_w',n,'eq.c');
...
parameter(N) = newParam('preN_w',N,'eq.c');
As described in the section How to Incorporate Preview Information in the MPC Problem, the parametric
additive terms g, which corresponds to the term \(B_w wi+B_w \dot{w}_i\), has
to be defined. At each stage of the multistage problem, the ‘g’ term (containing the
preview information) in the equality constraint is different, therefore we have to
define a parameter for each stage. In the definition of the parameters, ‘pren_w’
represents the name of the term \(B_w w_n+B_w \dot{w}_n\) at stage \(n\) of
the multistage problem. During runtime, the preview information is mapped to these
parameters.
\(N\) is the length of the prediction horizon which is set to be equal to the
preview horizon. The MATLAB code below, generates the function
VEHICLE_MPC_withPreview that takes -\(Ax\) and the additive term g as a
calling argument and returns \(u_0\), which can then be applied to the system:
%% MPC with Preview
% FORCESPRO multistage form
% assume variable ordering z(i) = [ui; x_i+1] for i=1...N-1
% Parameters: First Eq. RHS
parameter(1) = newParam('minusA_times_x0_minusBw_times_w_pre',1,'eq.c');
stages = MultistageProblem(N);
for i = 1:N
% dimension
stages(i).dims.n = nx+nu; % number of stage variables
stages(i).dims.r = nx; % number of equality constraints
stages(i).dims.l = nu; % number of lower bounds
stages(i).dims.u = nu; % number of upper bounds
% cost
if( i == N )
stages(i).cost.H = blkdiag(R,P);
else
stages(i).cost.H = blkdiag(R,Q);
end
stages(i).cost.f = zeros(nx+nu,1);
% lower bounds
stages(i).ineq.b.lbidx = 1:nu; % lower bound acts on these indices
stages(i).ineq.b.lb = umin*ones(4,1); % lower bound for the input signal
% upper bounds
stages(i).ineq.b.ubidx = 1:nu; % upper bound acts on these indices
stages(i).ineq.b.ub = umax*ones(4,1); % upper bound for the input signal
% equality constraints
if( i < N )
stages(i).eq.C = [zeros(nx,nu), Ad];
end
stages(i).eq.D = [Bdu, -eye(nx)];
% Parameters for Preview
if (i > 1)
parameter(i) = newParam(['pre',num2str(i),'_w'],i,'eq.c');
end
end
% define outputs of the solver
outputs(1) = newOutput('u0',1,1:nu);
% solver settings
codeoptions = getOptions('VEHICLE_MPC_withPreview');
% generate code
generateCode(stages,parameter,codeoptions,outputs);
You can download the MATLAB code of this example to try it out for yourself by
clicking here.
11.4.4. Comparison of Passive Vehicle and Active Suspension Control Using Preview Information¶
In Figure 11.12, Figure 11.13 and Figure 11.14, the accelerations in the direction heave, pitch and roll respectively are depicted. The blue graphs represent the the outputs when using MPC with preview information, while the red ones show the results of the simulation without using the preview information. One can see that taking the preview information into account leads to decreased maximal accelerations.
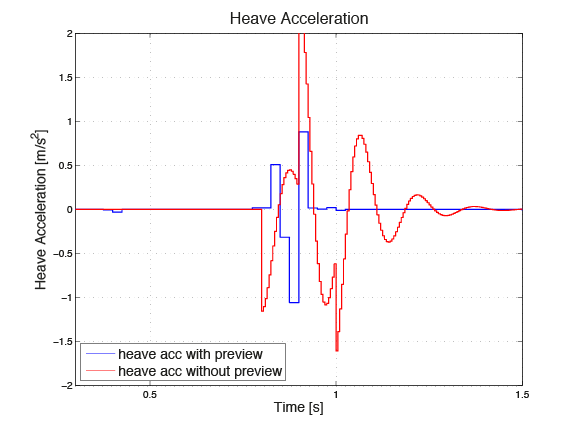
Figure 11.12 Acceleration in heave direction¶
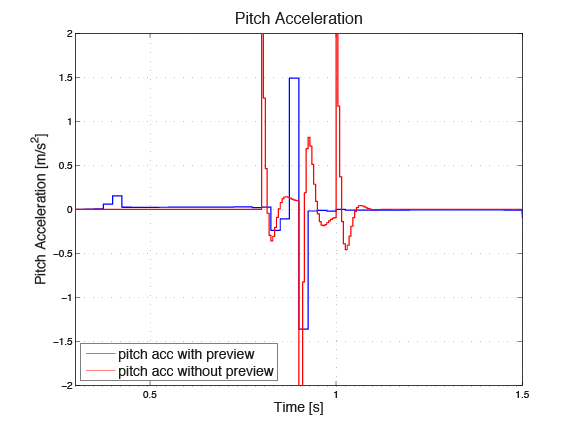
Figure 11.13 Acceleration in pitch direction¶
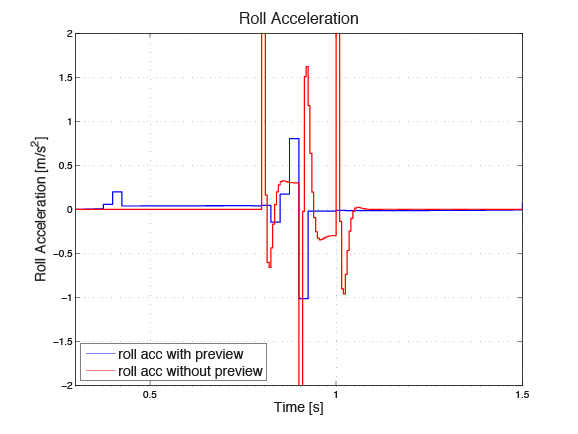
Figure 11.14 Acceleration in roll direction¶
Applying Model Predictive Control with Preview using FORCESPRO the riding comfort is improved significantly with minimum effort for designing the controller and generating code which can be deployed on any embedded automotive control unit.
The four graphs in Figure 11.15, Figure 11.16, Figure 11.17 and Figure 11.18 below show the input signal on each of the four actuators. One can see that model predictive controller starts lifting the front right part of the vehicle body as soon as the bump is in sight of the preview sensor, i. e. at time \(t = 0.3\) [s]. This is \(0.5\) seconds, the length of the preview horizon, before the front right wheel hits the bump at time \(t = 0.8\) [s]. This causes a better absorption of the shock and therefore reduced accelerations. The input constraints are also satisfied and \(u\) never exceeds the admitted range.
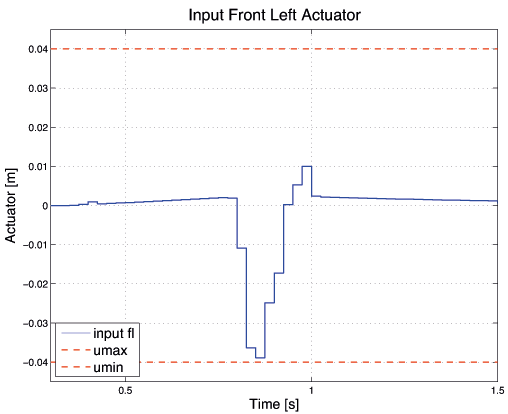
Figure 11.15 Input front left actuator¶
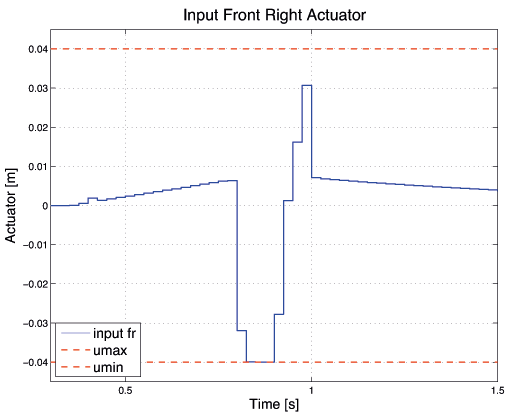
Figure 11.16 Input front right actuator¶
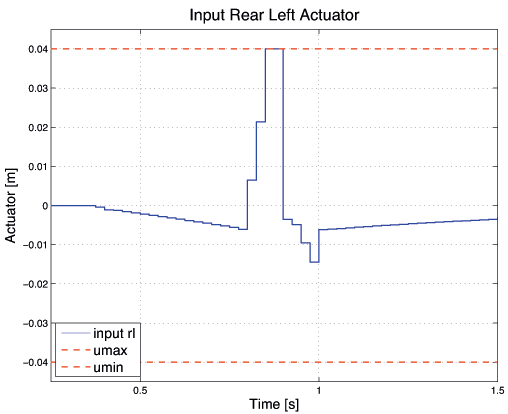
Figure 11.17 Input rear left actuator¶
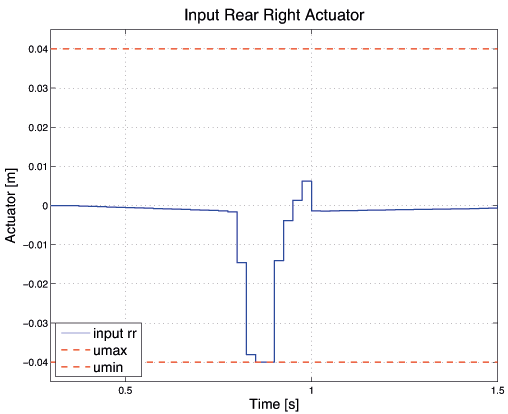
Figure 11.18 Input rear right actuator¶